方法
局部特征匹配
Few-shot Image Classification
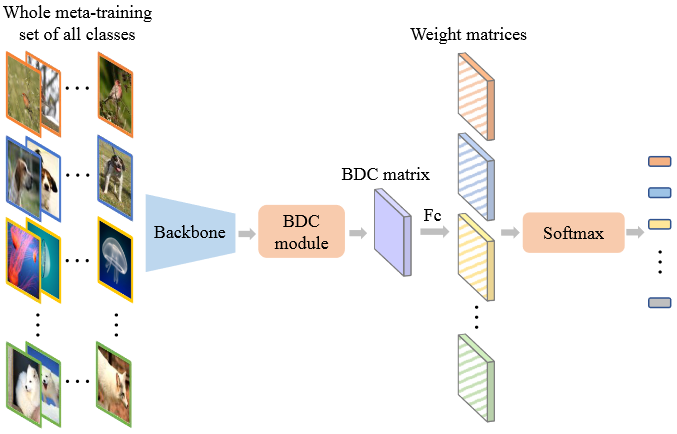
DeepBDC (CVPR 2022)
采用BDC距离衡量局部特征,具体来说,特征可选择在空间或通道维度进行两两相似度计算,之后作行、列归一化和开方得到BDC矩阵,并计算BDC矩阵的相似度作为度量。
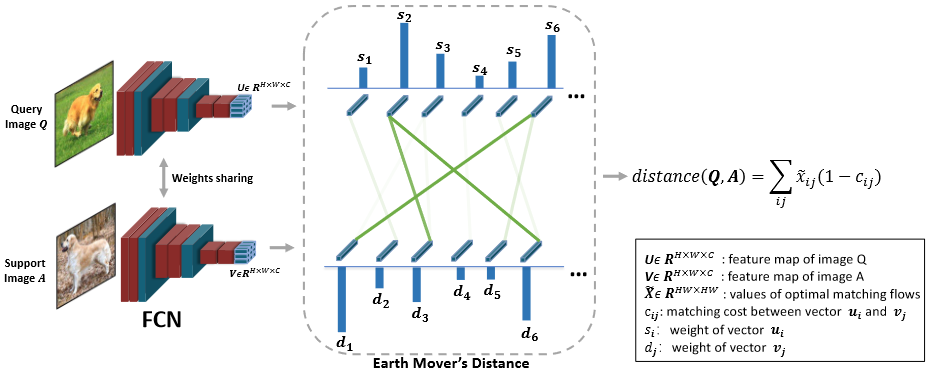
DeepEMD (CVPR 2020)
计算局部特征的最优化传输距离作为度量。
 #### Dense Classification (CVPR 2019)
对特征的每个region单独进行分类后融合分数。
#### Dense Classification (CVPR 2019)
对特征的每个region单独进行分类后融合分数。

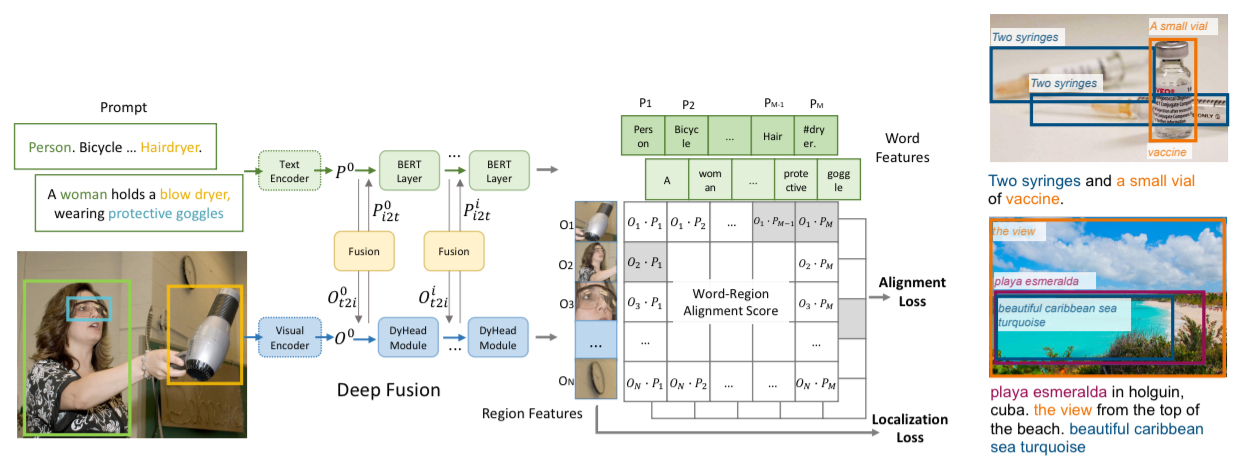
### VLM P re t ra in ing #### GLIP (CVPR 2022) 通过衡量图像区域与文本局部单词特征的相似度进行训练,为了加强匹配,还加入fusion模块促进两模态的融合。
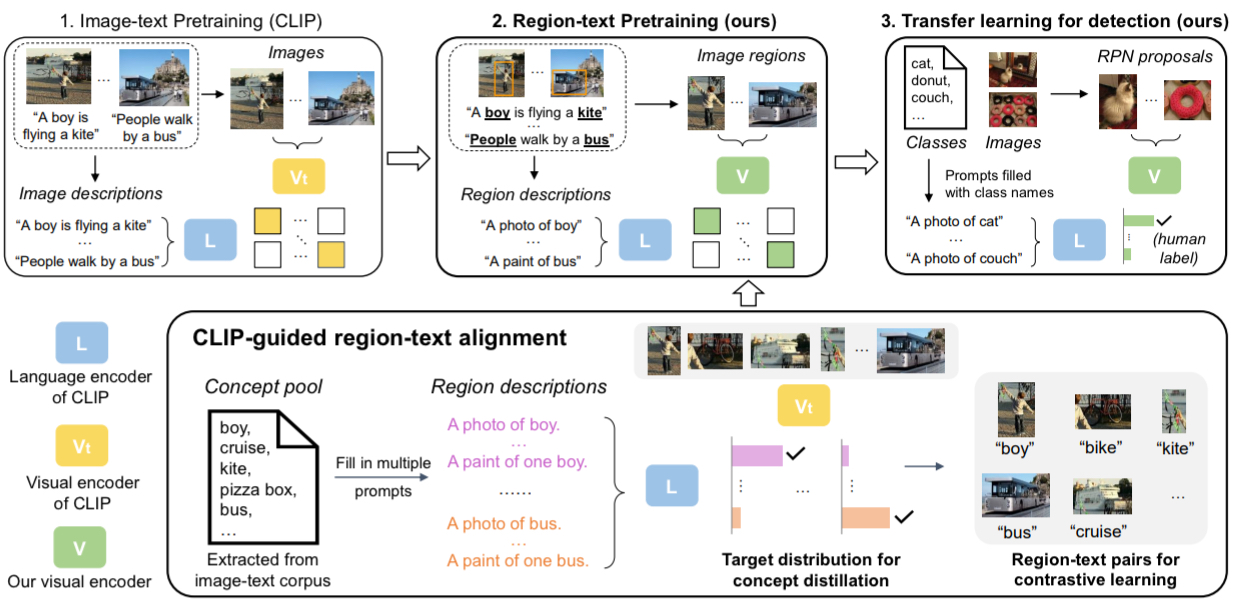
RegionCLIP (CVPR 2021)
CLIP首先在图像文本对上训练,之后在图像区域和类别描述对上训练,最后可用于细粒度的视觉任务。
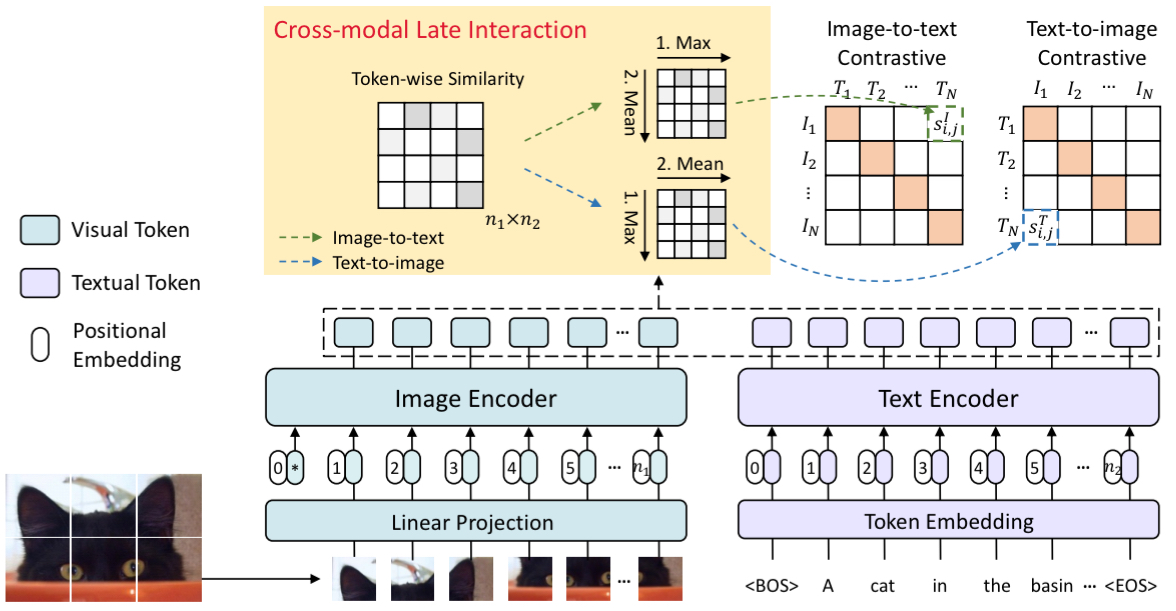
FILIP (arXiv 2021)
衡量图像和文本局部特征之间的相似度,之后聚合成全局相似度进行训练。
VLM Transfer
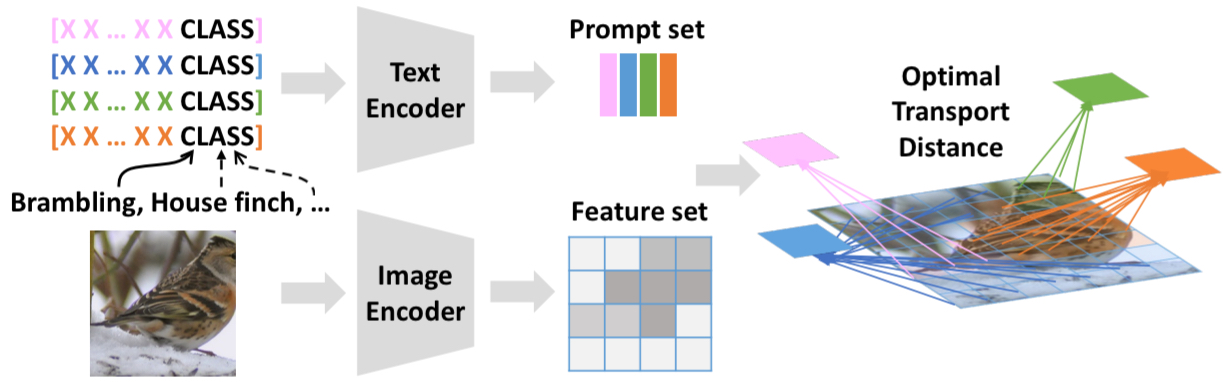
PLOT (ICLR 2023)
计算视觉局部特征与文本特征的最优化分配矩阵,通过加权融合得到每个类别的分数。
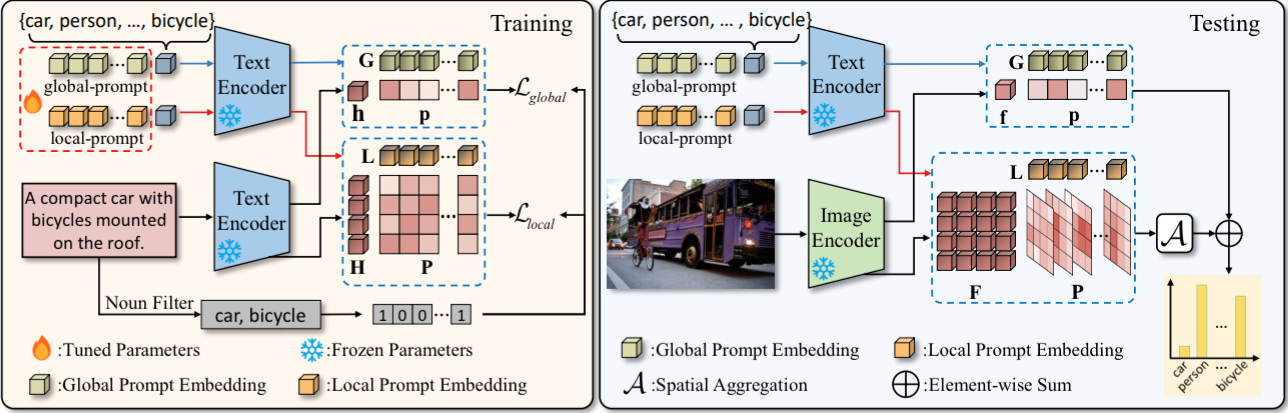
TaI-DPT (CVPR 2022)
利用摘要文本对预训练后,图像通过编码得到全局和局部特征,其中全局特征与全局prompt编码的文本特征计算相似度,局部特征则与局部prompt编码的文本特征计算相似度后融合,最后两者加权得到分数。
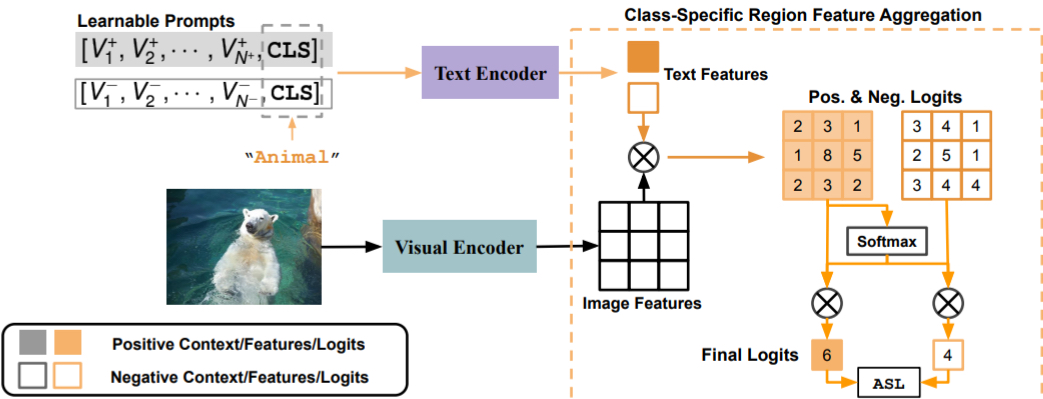
DualCoOp (arXiv 2022)
视觉局部特征与文本特征计算相似度,再通过softmax计算权重,最后加权融合。
Few-shot Object Detection
DETReg (CVPR 2023)
采用启发式方法在图像上挑选区域,并通过自监督模型为每个区域编码信息。训练一个检测器负责预测区域是否存在,位置及编码。

局部特征融合
Few-shot Image Classification
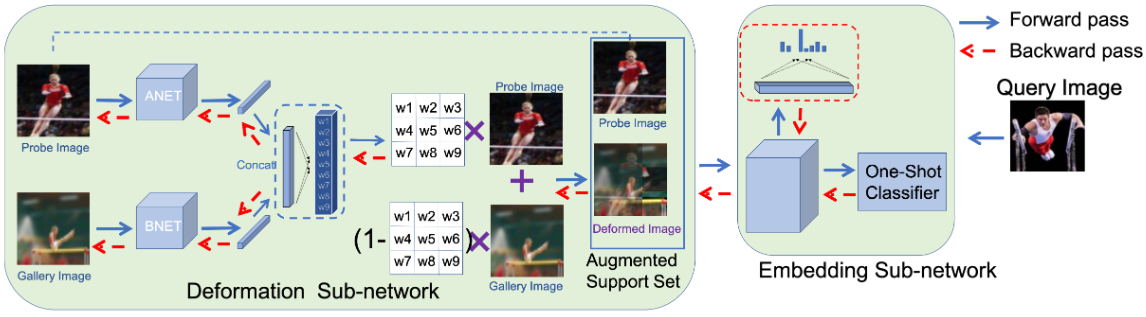
IDeMe-Net (CVPR 2019)
对于两张图像,预测每个region的权重,之后加权融合在一起,从而进行数据增强。
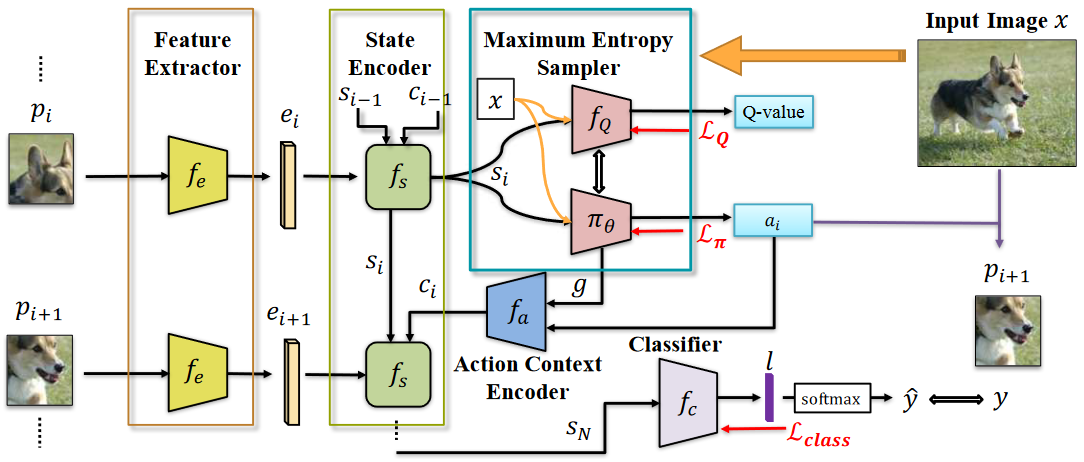
Spot and Learn (CVPR 2019)
利用强化学习预测一张图像上的patch序列,这些patch送入一个rnn进行预测。
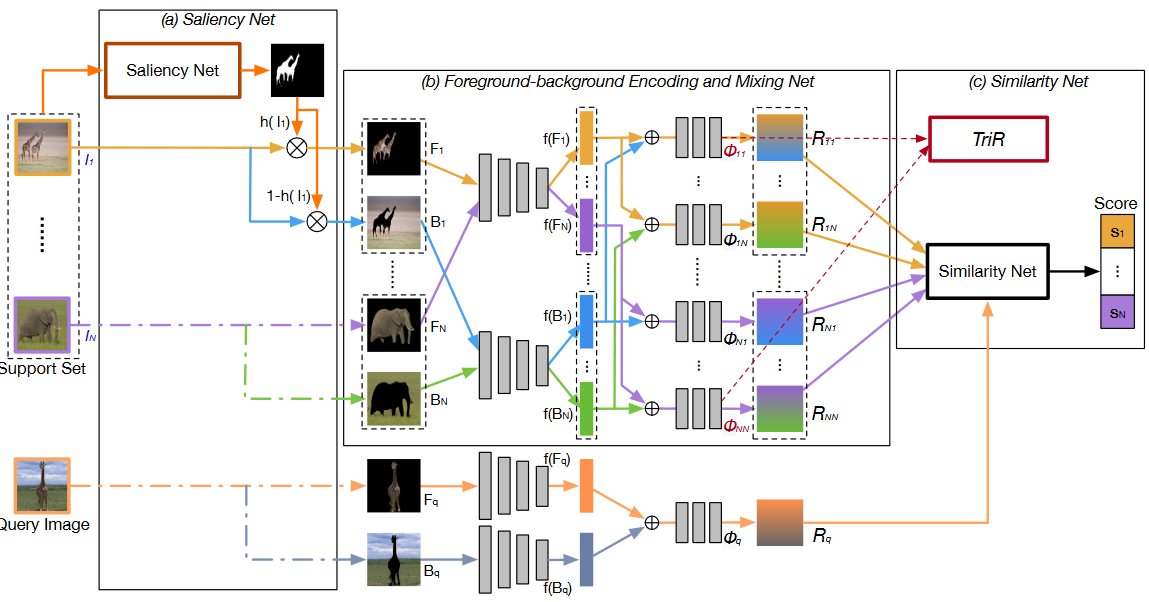
FEMN (CVPR 2019)
计算前/背景图像的相似度矩阵,之后拼接query图像与support图像的相似度矩阵并送入head预测分数。
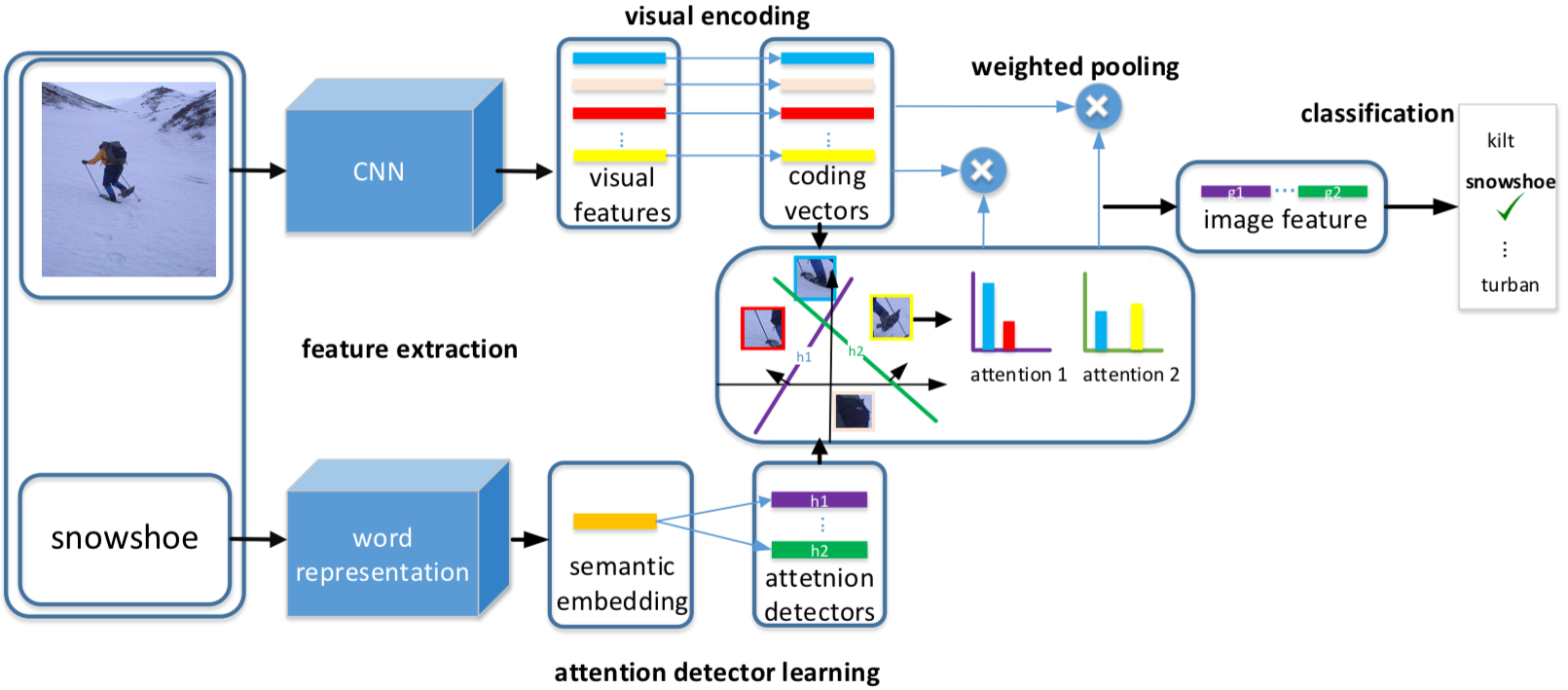
Attention Network (CVPR 2017)
计算词向量与视觉局部特征之间的相似度作为mask。
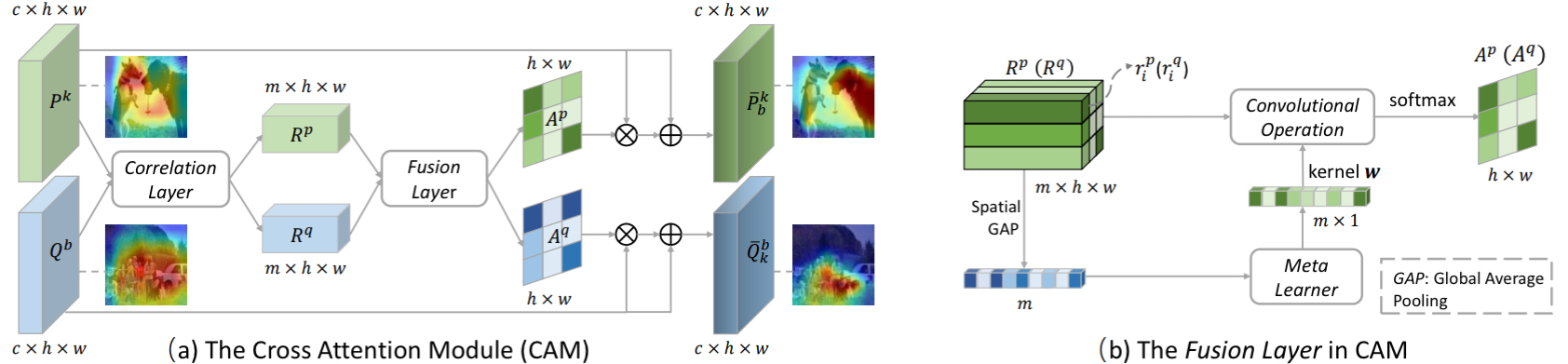
Cross Attention Network (NeurIPS 2017)
计算查询与支持特征局部特征的两两相似度(
VLM Pretraining
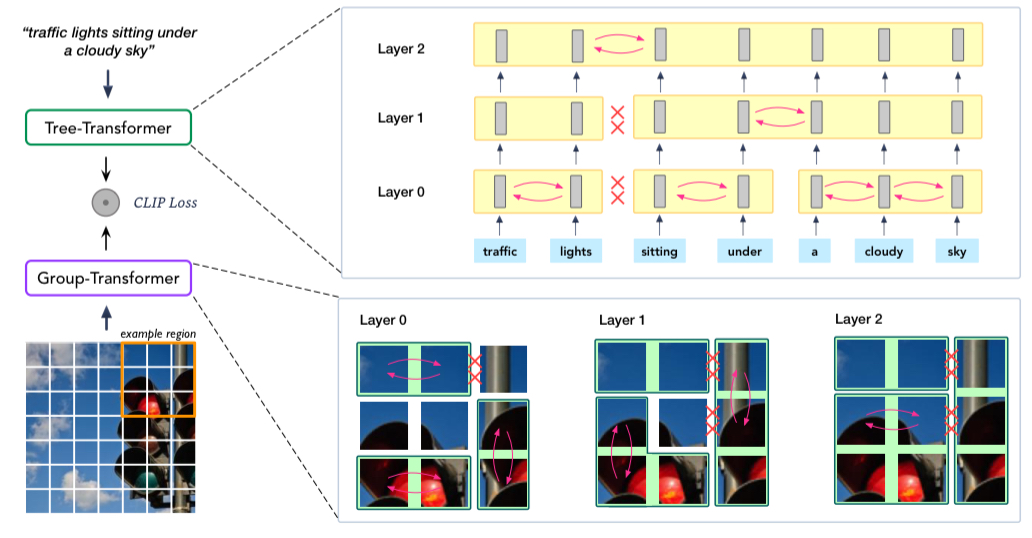
HICLIP (ICLR 2023)
transformer在各层前向过程中进行自适应的分组和分层。
VLM Transfer
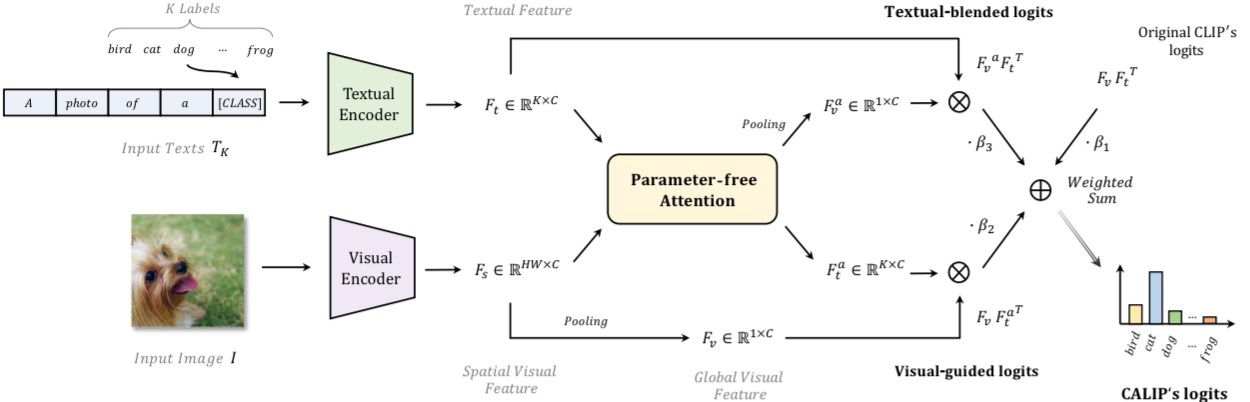
CALIP (AAAI 2023)
通过一个无需参数的注意力机制进行融合,利用融合后特征进行度量。
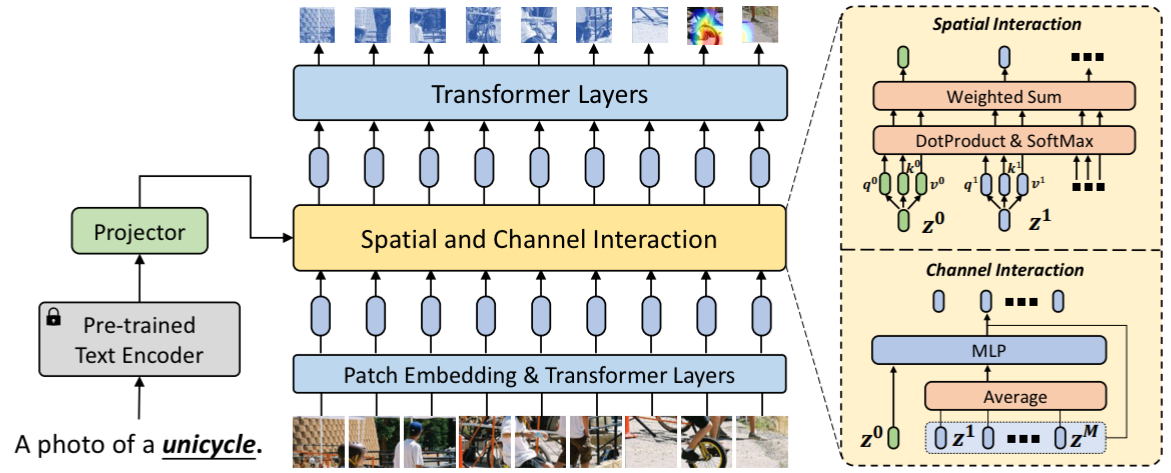
SP (CVPR 2023)
通过空间和通过交互对每个patch token进行融合,前者即将文本token与patch token拼接在一起作attention,后者即将文本token与patch token的均值拼接在一起通过MLP进行融合。
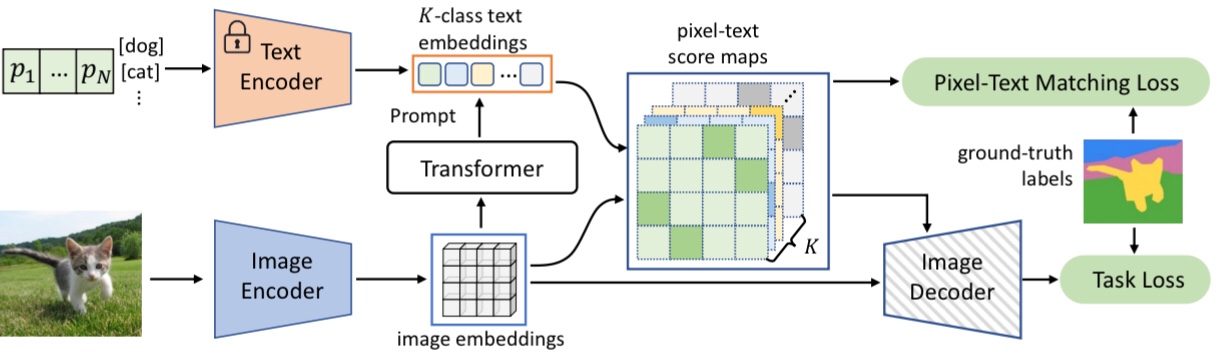
DenseCLIP (CVPR 2023)
文本特征与视觉局部特征计算相似度得到分数图,将分数图送入解码器来预测分割图。
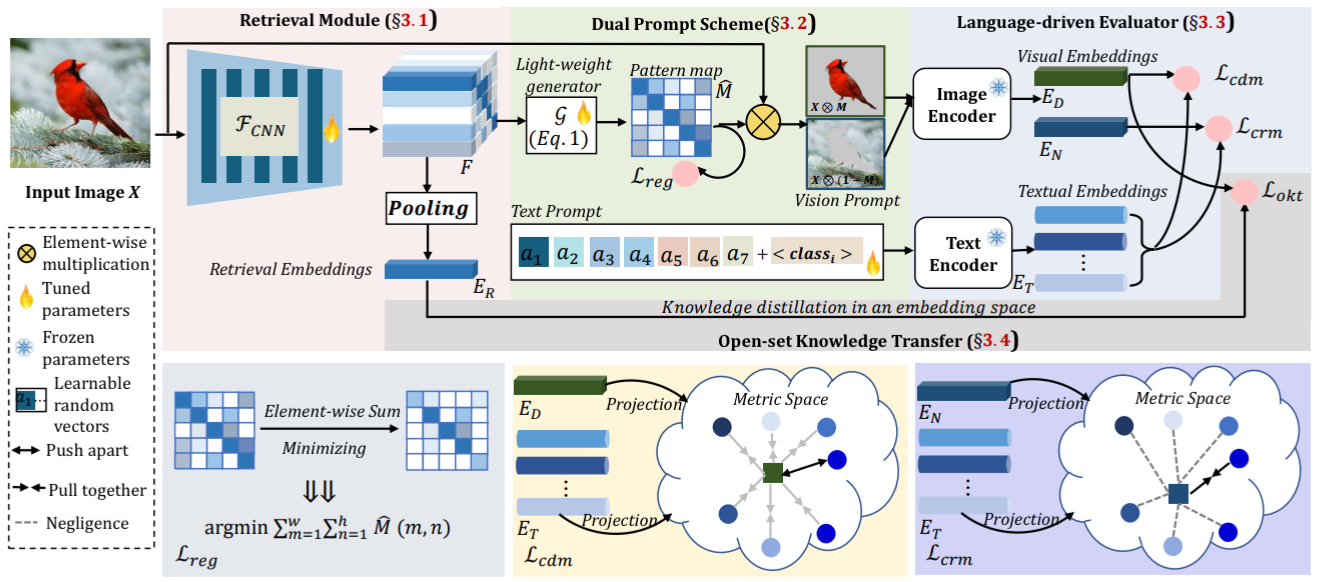
PLEor (CVPR 2023)
图像通过卷积网络再放缩回图像尺寸得到图像prompt,该prompt反映了每个像素包含类别特定特征的比例。于是prompt与原图相乘得到去除无关特征的图像,1-prompt与原图相乘得到只有无关特征的图像,两者进行编码得到特征,前者与对应类别的文本特征相逼近,后者与所有类别特征相远离。
Few-shot Object Detection
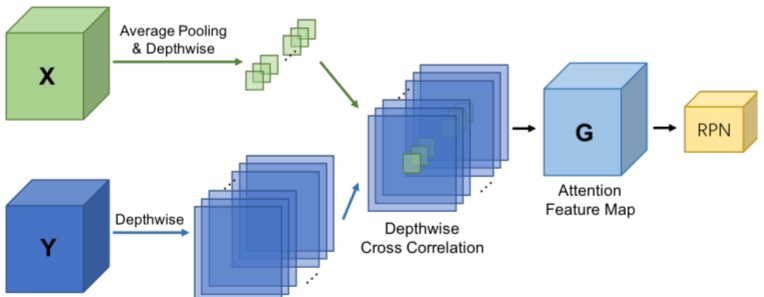
Attention RPN (CVPR 2020)
将支持集平均特征作为卷积核参数,在查询集局部特征上进行逐元素卷积进行融合。
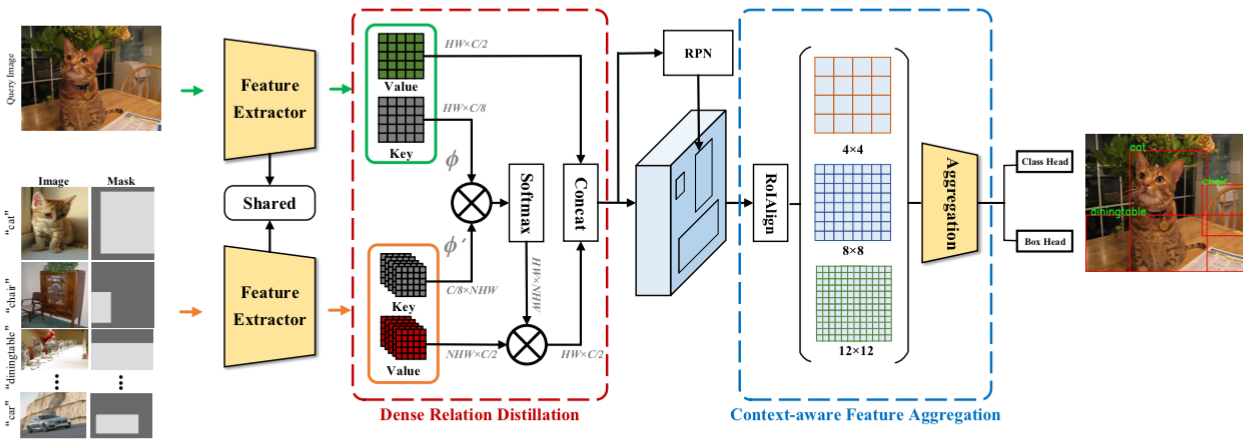
DRD (CVPR 2021)
通过co-attention机制进行查询与支持特征的深度融合。
DAnA (TMM 2021)
特征首先通过通道自注意力增强,之后查询与支持特征作attention并于支持特征自身的变换相加,最后注意力图与支持特征相乘得到每个空间位置的支持向量,并在多个shot之间求均值。

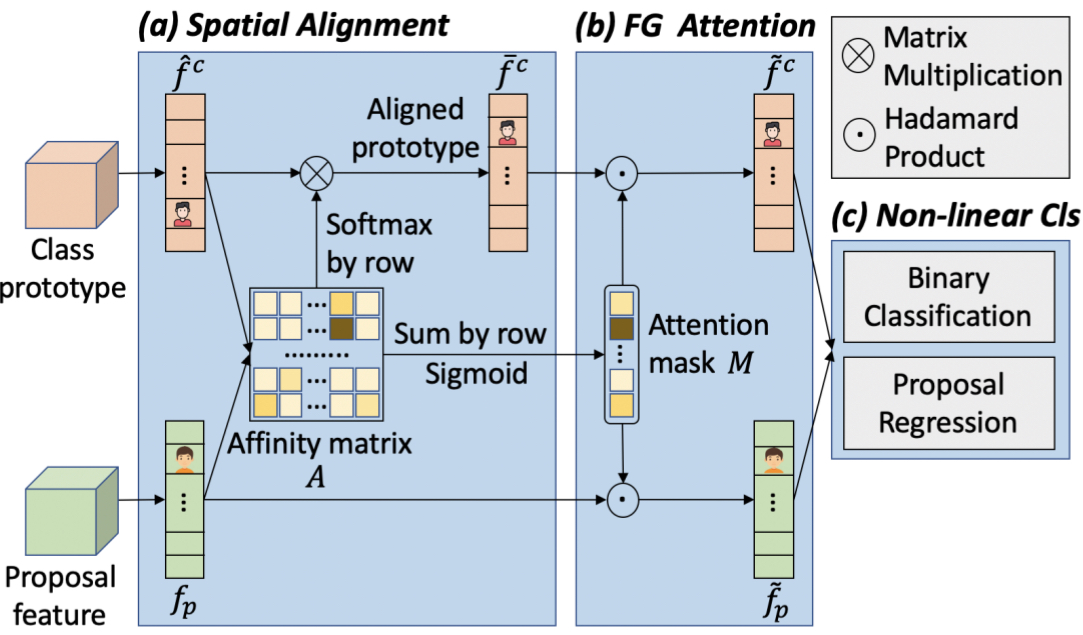
Meta Faster-RCNN (AAAI 2022)
支持和查询特征首先计算亲和力(即相似度)矩阵,与支持特征相乘以进行特征对齐,之后亲和力矩阵按行求和得到mask,与支持和查询特征相乘以保留前景。
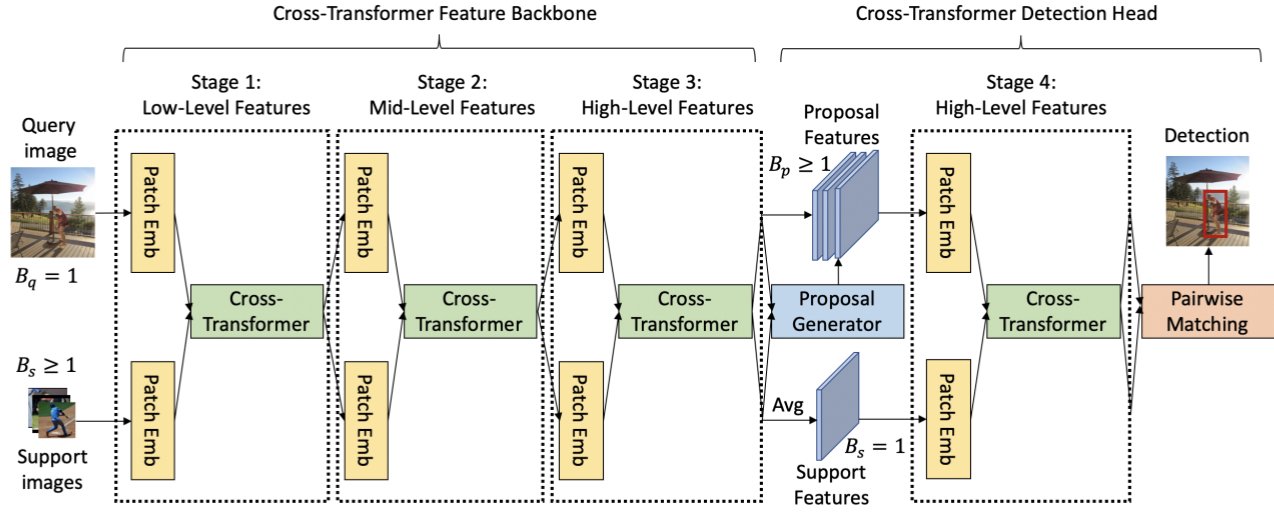
FCT (CVPR 2022)
采用cross transformer结构实现支持和查询特征的深入融合。
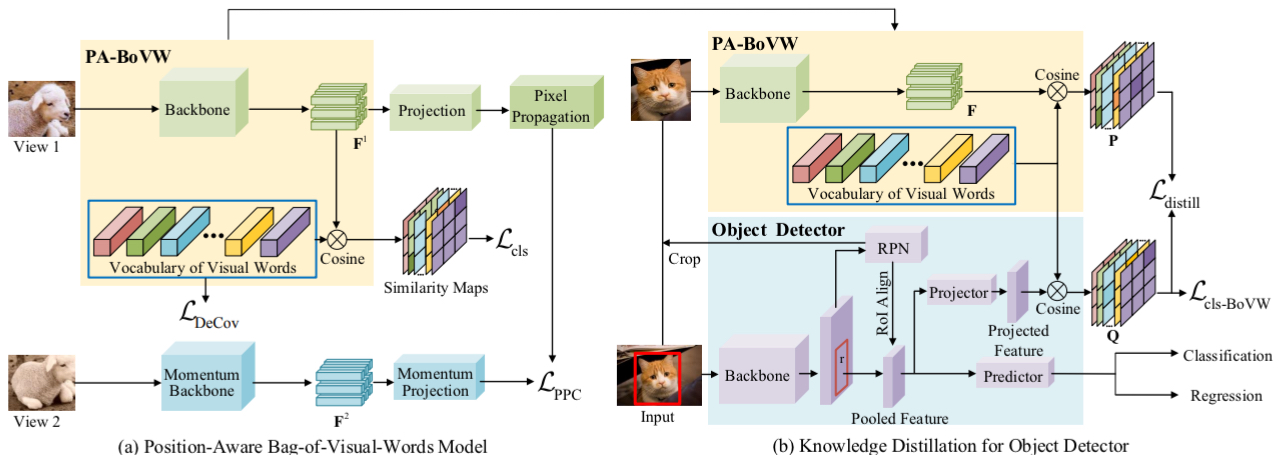
PA-BoVW (ECCV 2022)
利用自监督方法训练一个词袋(包含若干原型),之后利用词袋的每个原型与检测器backbone特征与自监督特征计算相似度得到相似度图,对两者的相似度图进行蒸馏。
其他方法
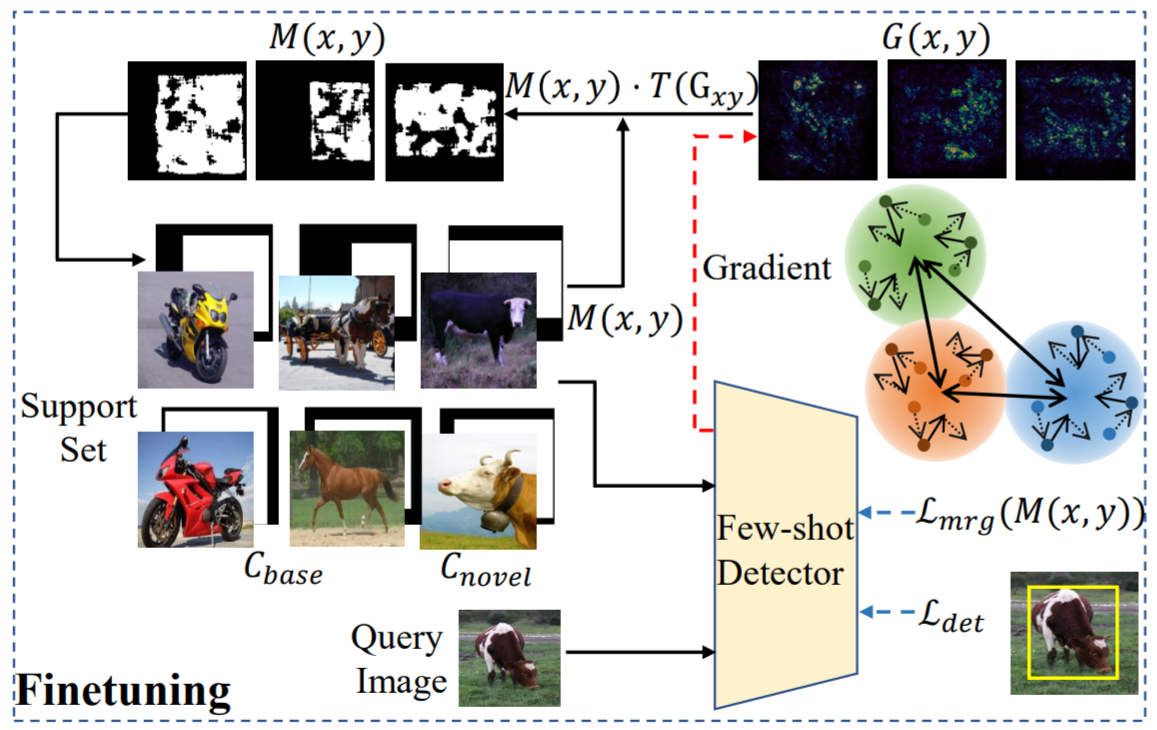
CME (CVPR 2021)
在finetune过程中逐渐屏蔽图像梯度最大的区域进行扰动,从而增强数据。
总结
局部特征的利用可以分为匹配和融合两大类。前者的目标是设计某种度量方式进行两种样本或模态之间的匹配,从而实现分类;后者的目标是使得两种样本或模态的特征按需求进行融合,更好馈送到之后的任务。
局部特征匹配 这类方法往往提出一些人工设计的度量指标(如协方差、BDC距离、EM距离等),代替简单余弦相似度;还有的方法提出可学习的模块用于匹配,例如对每个region单独进行分类后聚合。究其根本,度量方式可以分为: - region-region 这类方法对每个region单独打分,之后再进行聚合作为总分。 - set-set 这类方法直接将所有region视为一个集合,通过一些度量方式进行集合到集合的直接打分。
局部特征融合 这类方法通过一些特定的结构,实现局部特征自身,或是两个样本或模态的局部特征之间的融合。 - 对于局部特征自身的融合来说,一些分层或循环结构被采用,用于提取coarse-to-refine、low-to-high的特征。 - 对于跨样本或模态的局部特征融合来说,最主流的做法是类似attention或transformer的结构,如concat+attention、cross-attention、co-attention、多层cross-attention+ffn等,几乎是attention的各种变体。