随着深度学习的发展,计算机视觉领域取得了显著进展。然而,在小样本学习(Few-Shot Learning)场景下,传统的全局特征匹配方法往往难以捕捉图像中的细粒度信息,导致性能下降。
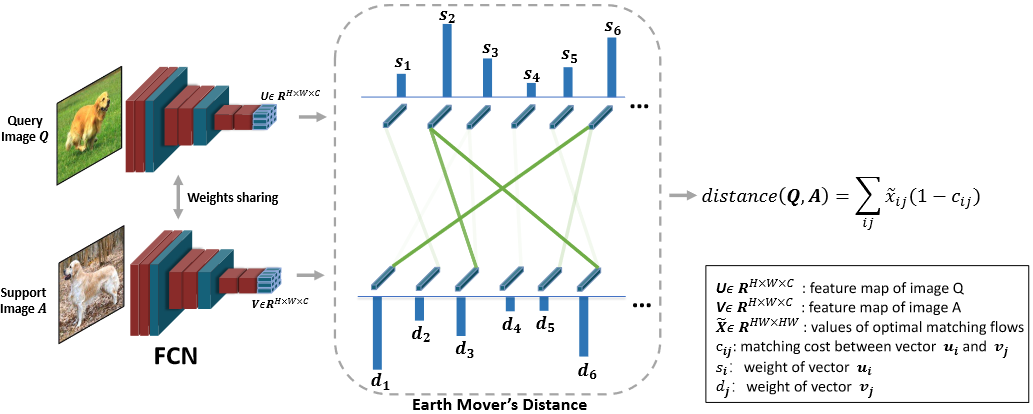
为了解决这一问题,研究者提出了Set-to-Set区域特征匹配方法,通过比较图像中的局部区域特征来提升匹配效果。
随着深度学习的发展,计算机视觉领域取得了显著进展。然而,在小样本学习(Few-Shot Learning)场景下,传统的全局特征匹配方法往往难以捕捉图像中的细粒度信息,导致性能下降。
为了解决这一问题,研究者提出了Set-to-Set区域特征匹配方法,通过比较图像中的局部区域特征来提升匹配效果。
随着深度学习的发展,计算机视觉领域取得了显著进展。然而,在小样本学习(Few-Shot Learning)场景下,传统的全局特征匹配方法往往难以捕捉图像中的细粒度信息,导致性能下降。
为了解决这一问题,研究者提出了Set-to-Set区域特征匹配方法,通过比较图像中的局部区域特征来提升匹配效果。
Few-shot learning旨在利用极少量数据使模型适应一个任务。由于样本量及其稀少,提取有效知识变得困难,模型非常容易过拟合到背景和噪声信息上。
本文调查了few-shot learning中提取知识的方法,包括模型结构、微调策略、度量策略等方面的设计,并希望总结出一些规律,在prompt tuning的设计上能够有所启发。

Towards Open World Object Detection (CVPR 2021 Oral) 提出了一个新的领域:开放世界目标检测(OWOD),该任务具体来说如下: 1. 测试集图像中可能包含来自未知类别的目标,需要把这些目标分类为unknown 2. 当某些未知类别的目标变得已知后,模型可以逐渐学习到这些类别

CNN在传统目标检测领域有很大的发展,并在医学图像、自动驾驶等领域具有广泛的应用。但是在旋转目标检测领域,一些传统方法便不再适用了。例如,水平矩形框的IoU计算方式要迁移到旋转矩形框上显得极为复杂且不可导;或是角度的加入导致了回归的边界和顺序问题。
深度学习在传统目标检测领域取得了很大的进展,然而在旋转目标检测上,传统的目标检测方法却有许多困难。由于目标边界框方向不定,基于水平边界框的检测方法无法适用。一些检测方法引入角度参数,然而这将导致回归的边界和顺序问题,导致损失不连续、回归困难等问题。
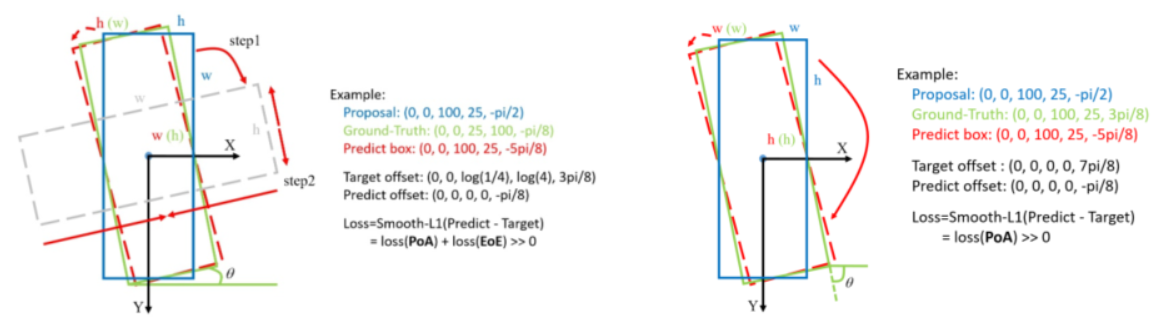
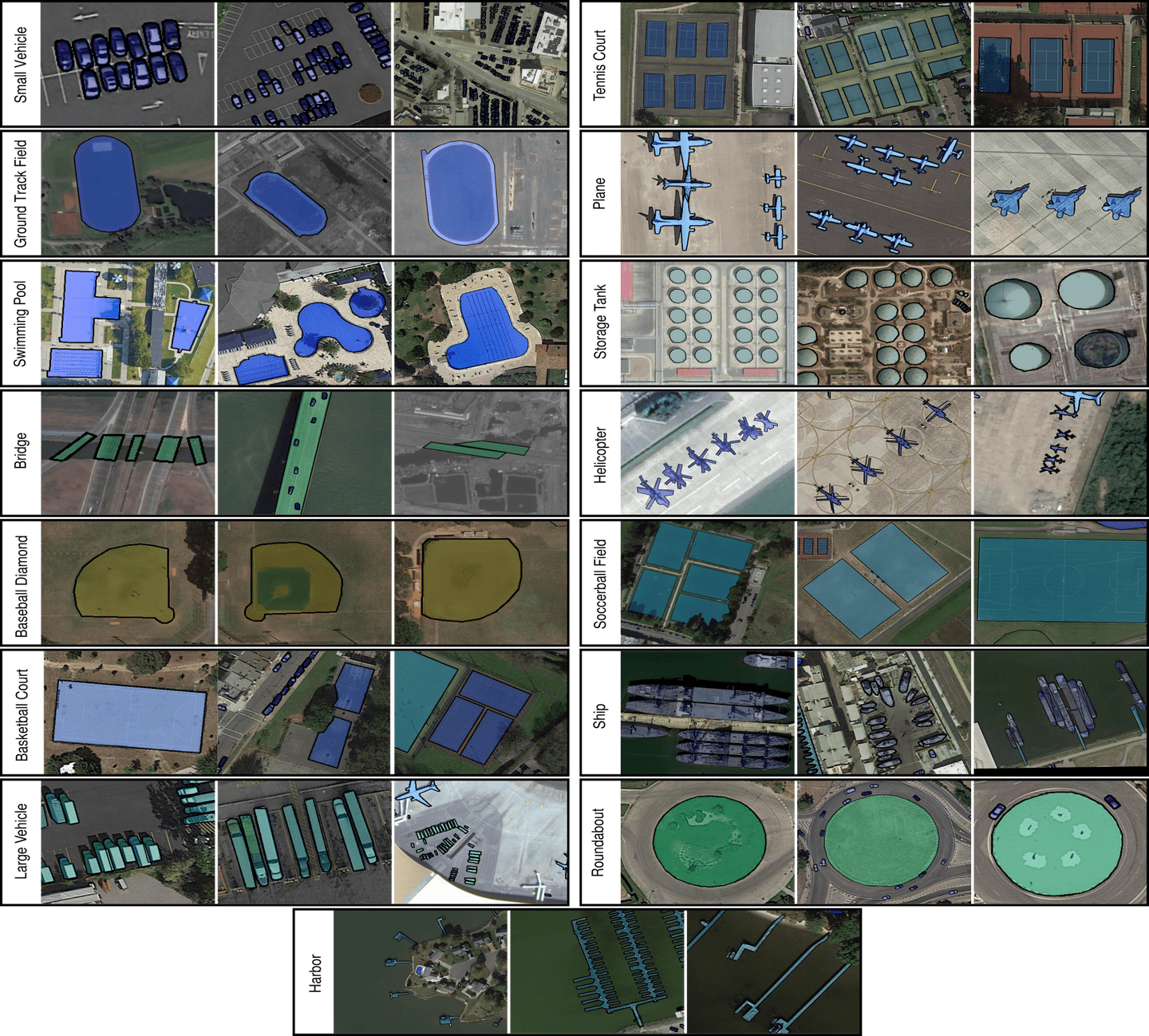
卫星遥感图像是一类特殊的图像,与通用目标相比,遥感图像的目标具有尺度差异大、目标分布密集等特点。同时,由于遥感目标具有明确的方向性,针对遥感目标往往设计了特殊的边界框。与传统目标的边界框相比,遥感目标的边界框往往是倾斜的,且不一定是矩形而是普通的四边形。针对这一特殊领域,各种旋转目标检测方法应运而生。
本文对旋转目标和典型旋转目标检测方法进行介绍,对其特点进行分析,希望能找到一些发展方向。
小目标检测是目标检测的一大难点,由于像素信息小、样本不均衡、严重的遮挡和模糊等原因,小目标检测的性能一直很难被有效提升。近年来,顶会发布的针对小目标检测的论文并不多,大多数方法除了对小目标有效之外,其实对通用目标的性能提升也是有帮助的。
记录一下昨天半夜学的东西,以下代码均通过tensorflow2自带的keras实现。
30行代码就可以实现看图识字!python使用tensorflow.keras搭建简单神经网络
大概几个月前,神经网络、人工智能等概念在我心里仍高不可攀,直到自己亲身上手之后,才发现搭建神经网络并不像自己想象的那么难。很幸运,我开始学习神经网络的时候Tensorflow2.0已经发布了。
Tensorflow2中内置了Keras库,Keras是一个由Python编写的开源人工神经网络库,可以作为Tensorflow、Microsoft-CNTK和Theano的高阶应用程序接口,进行深度学习模型的设计、调试、评估、应用和可视化。用Tensorflow2中自带的Keras库,会使得搭建神经网络变得非常简单友好。