Object-Centric Latent Action Learning (2025.6)
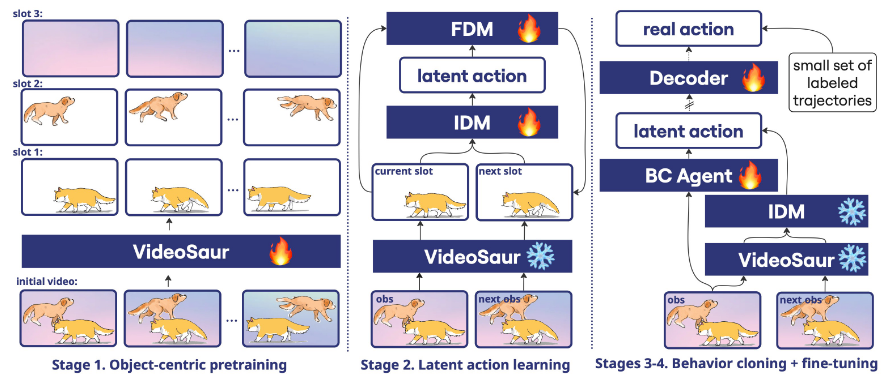
动机:视觉干扰物(如动态背景)在潜在动作学习中存在负面影响 方法:预训练视频模型将视频分解为可解释对象槽,通过线性回归选择前景对象槽学习latent
动机:视觉干扰物(如动态背景)在潜在动作学习中存在负面影响 方法:预训练视频模型将视频分解为可解释对象槽,通过线性回归选择前景对象槽学习latent
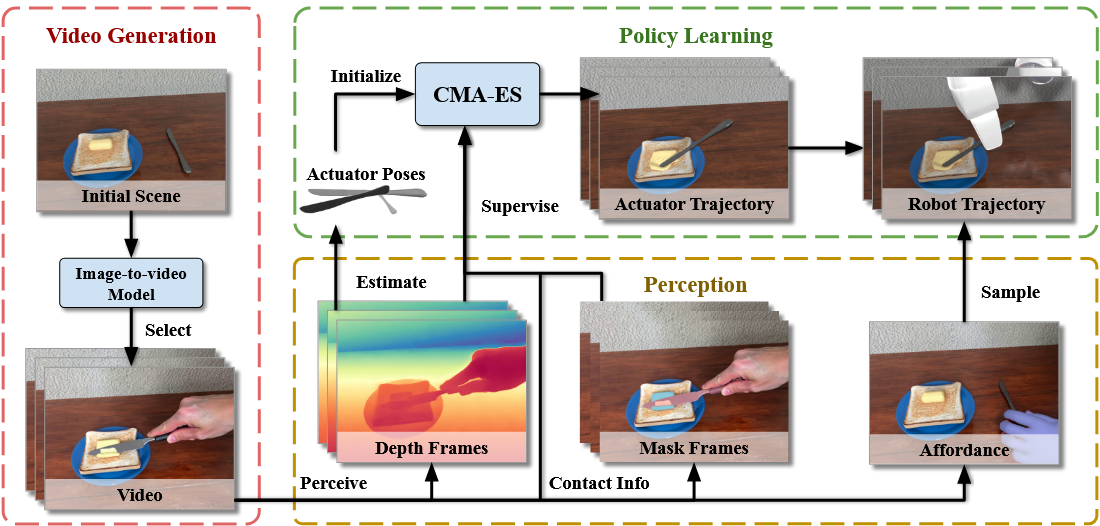 LuciBot通过密集的检测、分割、跟踪等方法,得到人手和操作物体的位置和运动轨迹,之后通过图像编辑将人手替换为机械臂,从而迁移到机器人数据
LuciBot通过密集的检测、分割、跟踪等方法,得到人手和操作物体的位置和运动轨迹,之后通过图像编辑将人手替换为机械臂,从而迁移到机器人数据
这种方法往往针对特定任务,且生成的视频不一定符合物理规律
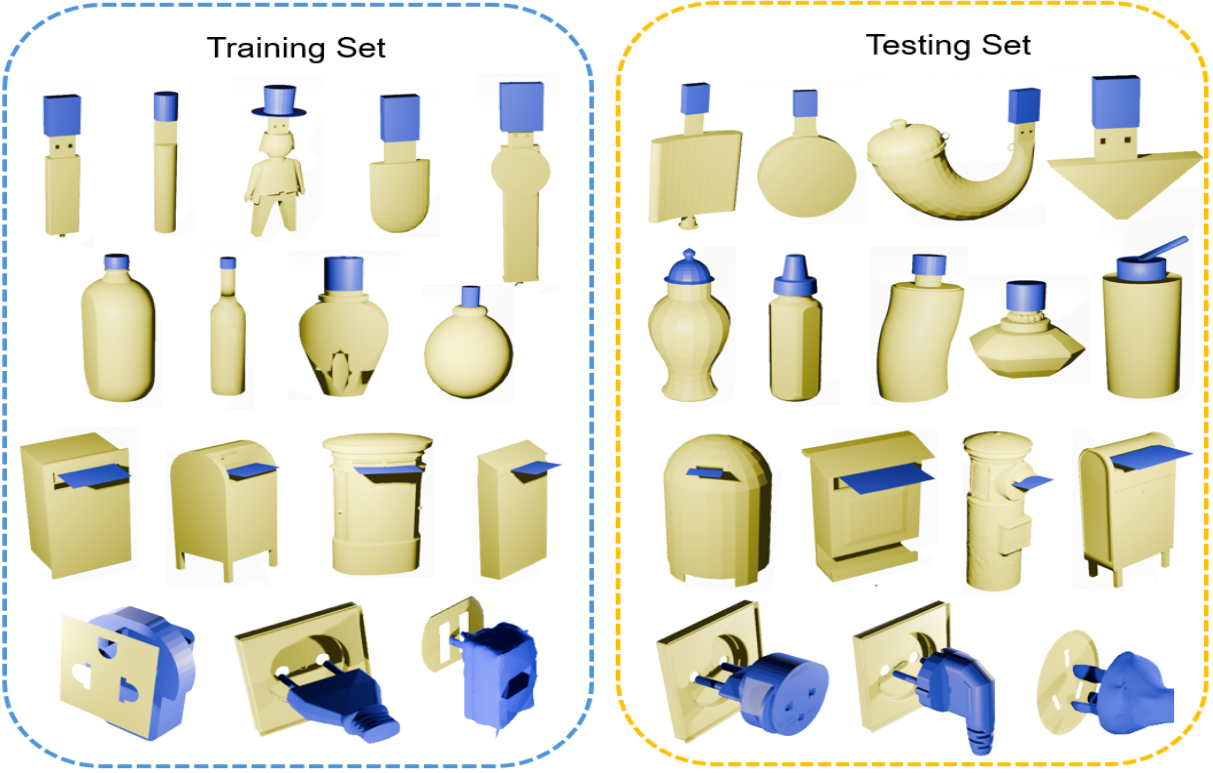 针对装配任务的数据集,将物体分成2个零件,提供零件在空间中的组合结构
针对装配任务的数据集,将物体分成2个零件,提供零件在空间中的组合结构