Towards Open World Object Detection (CVPR 2021 Oral) 提出了一个新的领域:开放世界目标检测(OWOD),该任务具体来说如下: 1. 测试集图像中可能包含来自未知类别的目标,需要把这些目标分类为unknown 2. 当某些未知类别的目标变得已知后,模型可以逐渐学习到这些类别
Towards Open World Object Detection (CVPR 2021 Oral) 提出了一个新的领域:开放世界目标检测(OWOD),该任务具体来说如下: 1. 测试集图像中可能包含来自未知类别的目标,需要把这些目标分类为unknown 2. 当某些未知类别的目标变得已知后,模型可以逐渐学习到这些类别

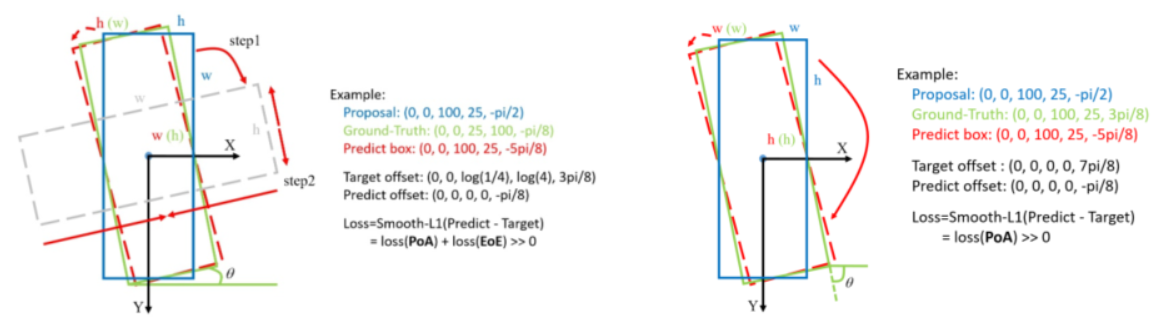
CNN在传统目标检测领域有很大的发展,并在医学图像、自动驾驶等领域具有广泛的应用。但是在旋转目标检测领域,一些传统方法便不再适用了。例如,水平矩形框的IoU计算方式要迁移到旋转矩形框上显得极为复杂且不可导;或是角度的加入导致了回归的边界和顺序问题。
深度学习在传统目标检测领域取得了很大的进展,然而在旋转目标检测上,传统的目标检测方法却有许多困难。由于目标边界框方向不定,基于水平边界框的检测方法无法适用。一些检测方法引入角度参数,然而这将导致回归的边界和顺序问题,导致损失不连续、回归困难等问题。
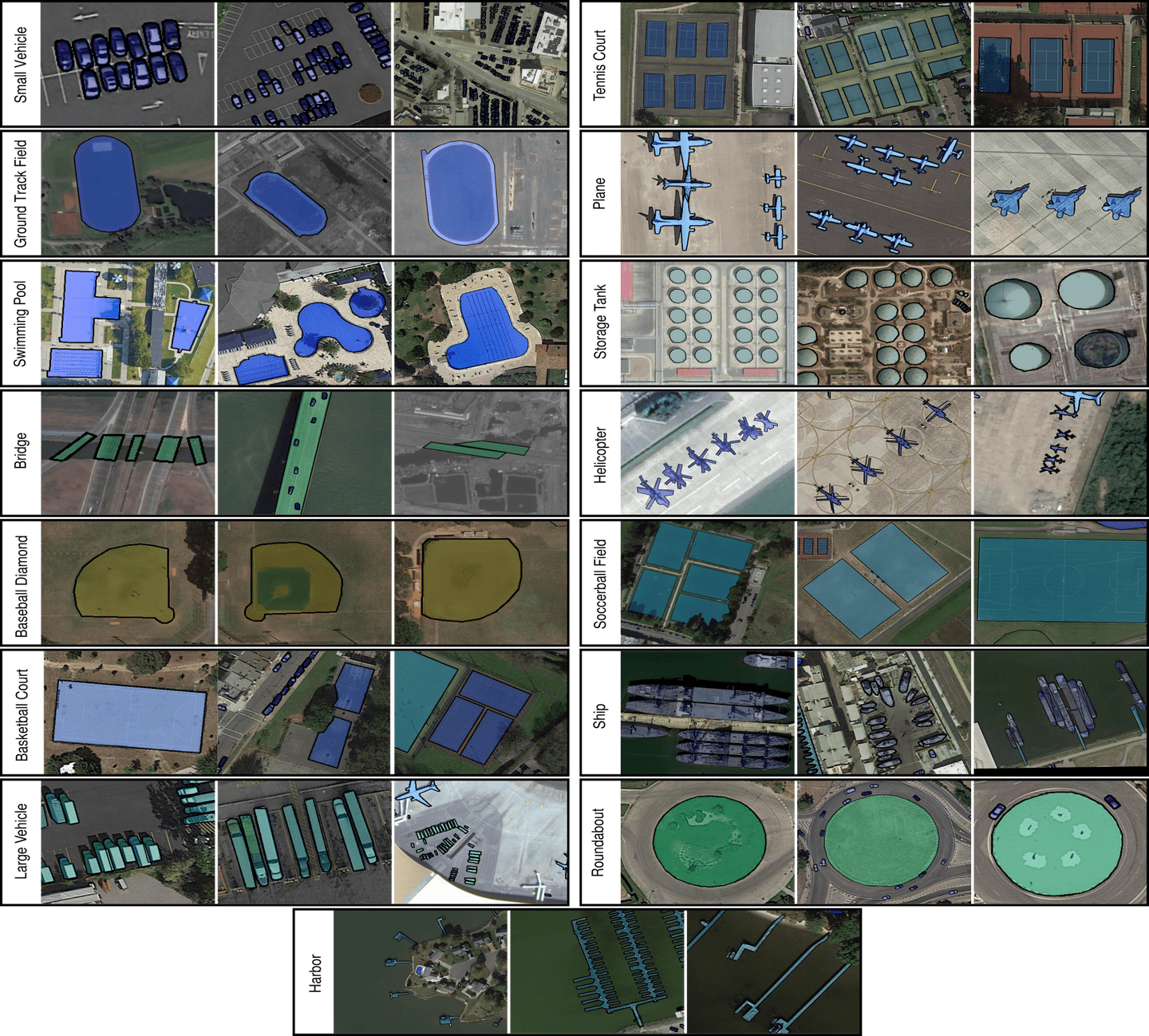
卫星遥感图像是一类特殊的图像,与通用目标相比,遥感图像的目标具有尺度差异大、目标分布密集等特点。同时,由于遥感目标具有明确的方向性,针对遥感目标往往设计了特殊的边界框。与传统目标的边界框相比,遥感目标的边界框往往是倾斜的,且不一定是矩形而是普通的四边形。针对这一特殊领域,各种旋转目标检测方法应运而生。
本文对旋转目标和典型旋转目标检测方法进行介绍,对其特点进行分析,希望能找到一些发展方向。